How does a sub-bottom profiler work?
A sub-bottom profiler survey is the fresh water or marine equivalent of a ground penetrating radar survey ( GPR ). It is also very similar to land based seismic reflection surveys. Consequently, presentations of the results are identical, other than variations in scale and post processing techniques. With the exception of the energy source, GPR has more in common with sub-bottom profiler surveys than land based seismic reflections surveys. These three types of geophysical surveys depend on a transmitted pulse of energy to propagate through the sub-surface. Eventually, the energy encounters a target or area of interest. Hopefully, the energy reflects off the target back to the surface. At the surface, a receiver records the response of the reflected energy. Thus, the only measure quantities are time and amplitude for reflection type geophysical surveys. Repeating this process along a line until one creates a geophysical cross-section is the end product.
The cross-sections, in theory, produce images that assists the user to visualize the sub-surface. In other words, cross-sections are like taking a picture of the sidewall of a huge trench. Good targets at depth produce amazing detail. Reflected energy can reveal buried bedrock surfaces, estimate sediment thickness, image excavations, locate fill, map bio-mass, detect gas or unsaturated zones, locate buried manmade features (tunnels, cables, boats, and other), and map deep structures associated with mineral and oil deposits (requires very large scale reflection methods). However, it takes very high-resolution sub-bottom profiler systems or GPR to locate and image small targets (e.g., pipelines, drums, archaeological features, etc.).
GPR vs Sub-bottom profiler
GPR collects data along the surface of the ground using an electromagnetic pulse. Whereas, a submerged sub-bottom profiler system utilizes sound or acoustic energy. The energy pulse or transmitted signal is from a chirper or pinger. For that reason, sub-bottom profilers have a far greater depth of penetration in water (especially saltwater) than GPR. Likewise, the acoustic energy penetrates deeper into the subsurface than GPR. Though I have heard of sub-bottom profilers modified for use on land, I am not aware of any successful hydrographic surveys. Without permanently saturated soils, it is a tough proposition for a water-based system to respond well on ground. It is a little like building cars to drive on lakes, not generally a practical idea. Follow this link for more on GPR.
What is a sub-bottom profile survey?
A sub-bottom profile survey is the process of collecting 10’s and even 100’s of lines over an area of interest. It operates like a echosounder or fish locator on steroids. A sub-bottom profiler has lower resolution and a more powerful chirper or pinger. Consequently, we place the geophysical recording system in a vessel and pilot it back and forth over the survey area collecting data with the sub-bottom profiler. Today, the location of the equipment and boat are often tracked using sub-meter global positioning systems ( GPS ). Maintaining an accurate record of the survey lines is important. It allows one, during post processing, the opportunity to create 3-D images of the results. In spatially large hydrographic surveys or projects with limited budgets, producing 3-D images may be outside the scope of the project.
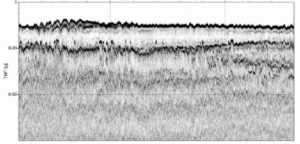
Sub-bottom Profile Record With Shallow Layers
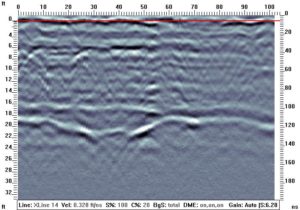
GPR Plots Look Like Sub-bottom Profiler Results
Applications for a sub-bottom profiler.
Applications for near surface geophysical surveys and hydrographic surveys are small scale compared to the marine surveys gas and oil companies conduct. Geophysicists, engineers, geologists, and others are known to put a great level of effort in to acquiring very shallow and even extremely shallow sub-bottom profile survey results. Specially designed system record sub-bottom profile data in as little as five to ten feet of water. The success of these extremely shallow and very shallow surveys are strongly dependent on site conditions. One will find that survey data collected in areas with more than 10 feet of water are often easier to interpret. Sub-bottom profiler equipment for near surface geophysical applications, more or less, has a range between 5 and 500 feet of water. As with all geophysical methods, greater depths of interest demand the target of interest to increase in size and easier to detect.
In addition to geophysicists and geotechnical engineers, one will find professionals such as archaeologists, environmental specialists, and safety consultants incorporating sub-bottom profile results in to their investigations. A great number of hydrographic surveys yield bedrock depth, sediment thickness, or fill thickness. It is also often important to locate artifacts, map changes in the bottom, and assist with locating underwater hazards like cables, pipes, and manmade structures. Mappable variations can include scouring, locating gas bearing zones, and changes in compaction or density. Thus, many near surface hydrographic surveys are from larger rivers, bays, harbors, lakes, and larger scale reservoirs.
The early days.
My first experience with geophysical reflection surveys was with sub-bottom profilers in 1990’s. These experiences included reservoirs, dams, large rivers, lakes, and harbors. The first project imaged the sediment thickness behind a power dam. The results assisted with determining the environmental impact of removing the dam. In those days, a pinger was the only source for small-scale operations. Shortly after that, I invested in the equipment and software to conduct seismic reflection surveys on land. Acquiring, processing, and presenting land based seismic reflection data was far more difficult than the sub-bottom profiling surveys I had conducted on inland waters. Later on, GPR became popular. I now own several GPR systems and find them very useful. Some of the best high-resolution results I have are of sediments in a pond using GPR on top of ice.
Troubleshooting Sub-bottom profile surveys.
Though often assumed, one may not have an observable target. A target or zone of interest needs to be large enough or thick enough to detect. It also needs to be made of materials that will produce a reflection. For example, the bedding planes or contacts between similar clay units may not produce a reflection. The materials are too much alike. What we need are two materials that have a great enough difference in acoustic impedance to produce a reflection. Acoustic impedance is the product of the bulk density times the compressional wave velocity. Thus, this is why the contact between bedrock and sediments often produces a very nice reflection. Generally, bedrock has a high acoustic impedance and sediments have a low acoustic impedance.
As discussed, sub-bottom profile surveys experience many of the same problems that GPR and seismic reflections surveys face. Without doubt, the reasons for this are that the physics behind these geophysical methods are embedded in wave and particle theory. The theories applied here come from within the branches of physics known as optics and acoustics. The basic principles of these disciplines explain how and why energy passes through the earth as well as why it does not. The primary problems at hand, in addition to good quality equipment, are achieving good penetration and enough resolution to detect or image the target of concern.

Factors that control penetration and resolution
Above all, it is the amount of energy created and transferred into the subsurface that controls the depth of penetration. More energy over a longer period will achieve greater penetration. This helps overcome the problem of absorption and a general loss of signal. Unlike the loss of energy from spreading as the signal propagates farther from the source, energy is absorbed when molecules vibrate. At low frequencies, absorption is not as much of an issue as the loss of energy from other factors. Specifically, the most common loss of energy occurs from the reflection produced by the bottom of the water column (e.g. sea floor or the bottom of a lake, river, harbor, etc.). This reflection reduces that amount of energy available to pass or propagate further into the subsurface. As a result, people often want to use a source that has more energy.
How much power is needed for a sub-bottom profiler?
However, one will find out that an increase in energy can lead to a decrease in resolution and an increase in unwanted responses. With more energy, it is easier for nearby up sloping features, which are not located directly below the sub-bottom profiler system, to return energy to the receiver. In addition, more energy can lead to multiples. Multiples are secondary reflections produced from energy reflecting off an area of interest at depth more than once. In other words, the energy that was initially returned to the surface is reflected off the water’s surface and manages to propagate back down and create additional reflections from the area of interest. In shallow water, this can happen numerous times, which can easily complicate the interpretation of the results. Finally, too much energy can also over saturate or “swamp” the electronics.
While more energy increases penetration, it is often at the expense of higher frequencies. Low frequency energy does not reflect off small features very well and passes through thin beds. Thus, the initial thought that comes to mind is to create as much high frequency energy as possible. First, that can be difficult to do. Secondly, high frequency energy is more easily absorbed, reflected, and scattered. Scattering can take place from objects within the water column. Also, layers that contain objects large enough to reflect energy can cause scatter. For example, buried debris, course grained material, boulders in sediments, organic matter in the water, and changes in water temperature can cause scattering. Scattering also takes place at rough or irregular bedding surfaces. In other words, smooth surfaces reflect energy back to the sub-bottom profiler better than rough surfaces.
Noise
Noise is not generally a function of the geology at depth. By definition, noise is random and generally continuous over long periods. Equipment design, water conditions, hull and prop design, ship speed, and the placement of equipment with respect to the hull are some of the sources of general noise. People often say that the 60 Hz electronics are producing noise. In my opinion, the 60 cycle “noise” is more of a source of unwanted signal. I do not think of general noise having a specific frequency.
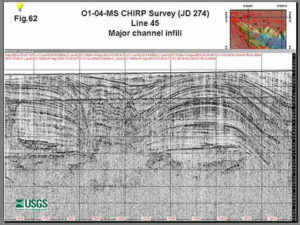
Sub-bottom Profile Record Courtesy USGS
Sub-bottom profile surveys may work in these types of bodies of water
With Wikipedia’s help, here is a subjective, shortened, and reorganized list of locations where one may conduct hydrographic surveys with a sub-bottom profiler.
Very shallow bodies of water (this is not always an easy task).
Artificial lake or artificial pond – see reservoir or impoundment.
Billabong – see Oxbow lake; a pond or still body of water created when a river changes course and some water becomes trapped. Australian.
Kettle (or kettle lake) – a shallow, sediment-filled body of water formed by retreating glaciers or draining floodwaters.
Lagoon – a body of comparatively shallow salt or brackish water separated from the deeper sea by a shallow or exposed sandbank, coral reef, or similar feature.
Millpond – a reservoir built to provide flowing water to a watermill
Oxbow lake – a U-shaped lake formed when a wide meander from the mainstream cuts off a river to create a lake.
Pond – a body of water smaller than a lake, especially those of artificial origin.
River – a natural waterway usually formed by water derived from either precipitation or glacial meltwater, and flows from higher ground to lower ground.
Tarn – a mountain lake or pool formed in a cirque excavated by a glacier.
Tributary or affluent – a stream or river that flows into a main stem (or parent) river or a lake.
Vernal pool – a shallow, natural depression in level ground, with no permanent above ground outlet, that holds water seasonally.
Common bodies of water for a sub-bottom profile survey.
Artificial lake or artificial pond – see reservoir or impoundment.
Canal – an artificial waterway, usually connected to (and sometimes connecting) existing lakes, rivers, or oceans.
Cove – a coastal landform. Earth scientists generally use the term to describe a circular or round inlet with a narrow entrance (colloquially it may refer to any sheltered bay.
Delta – the location where a river flows into an ocean, sea, estuary, lake, or reservoir.
Harbor – an artificial or naturally occurring body of water where ships store or may shelter from the ocean’s weather and currents.
Lake – a body of water, usually freshwater, of relatively large size contained on a body of land.
Loch – a body of water such as a lake, sea inlet, firth, fjord, estuary or bay.
Reservoir – a place to store water for various uses, especially drinking water, which can be a natural or artificial (see Lake and Impoundment above)Sea loch – a sea inlet loch.
Sea lough – a fjord, estuary, bay or sea inlet.
Strait – a narrow channel of water that connects two larger bodies of water, and thus lies between two landmasses.
Deeper bodies of water that require more powerful sub-bottom profile equipment.
Arm of the sea – also sea arm, used to describe a sea loch.
Bay – an area of water bordered by land on three sides, similar to, but smaller than a gulf.
Gulf – a part of a lake or ocean, similar to, but larger than a bay.
Ocean – a major body of salty water that, in totality, covers about 71% of the Earth’s surface.
Sea – a large expanse of saline water connected with an ocean, or a large, usually saline, lake that lacks a natural.
Sound – a large sea or ocean inlet larger than a bay, deeper than a bight, wider than a fjord, or it may identify a narrow sea or ocean channel between two bodies of land.
Unlikely locations for a sub-bottom profile survey, unless the water depth is greater than expected.
Basin – see Drainage basin.
Bayou – a slow-moving stream or a marshy lake.
Mangrove swamp – Saline coastal habitat of mangrove trees and shrubs.
Marsh – a wetland featuring grasses, rushes, reeds, typhas, sedges, and other herbaceous plants (possibly with low-growing woody plants) in a context of shallow water. See also Salt marsh.
Pool – various small bodies of water such as a swimming pool, reflecting pool, pond, or puddle.
Salt marsh – a type of marsh that is a transitional zone between land and an area, such as a slough, bay, or estuary, with salty or brackish water.
Spring – a point where groundwater flows out of the ground, and is thus where the aquifer surface meets the ground surface
Stream – a body of water with a detectable current, confined within a bed and banks.
Swamp – a wetland that features permanent inundation of large areas of land by shallow bodies of water, generally with a substantial number of hummocks, or dry-land protrusions.
Tide pool – a rocky pool adjacent to an ocean and filled with seawater.
Wetland – an environment “at the interface between truly terrestrial ecosystems and truly aquatic systems making them different from each yet highly dependent on both” (Mitsch & Gosselink, 1986).

Locating Deep Facilities Using ERI, EM, MASW, pulseEKKO Ultra GPR, and Magnetometers for Buried Cables Voids Pipes
Geophysics for voids under buildings, floors, foundations, parking lots, and factories

Geophysical Services Conducted. A Short List of Clients, Landfills, Government Sites, and Locations.

Chart Comparing 57 Geophysical Methods With 17 Applications and Disciplines

Less Common Near Surface Geophysical Equipment

NAICS and SIC Codes for Geophysical Surveying and Mapping Services

Geophysics and Geophysical Services From Archives and Old Posts